
CUDA是一种通用的并行计算平台和编程模型,是在C语言上扩展的。借助于CUDA,你可以像编写C语言程序一样实现并行算法。你可以在NIVDIA的GPU平台上用CUDA为多种系统编写应用程序,范围从嵌入式设备、平板电脑、笔记本电脑、台式机工作站到HPC集群。在CUDA编程平台中,GPU并不是一个独立运行的计算平台,而需要与CPU协同工作,可以看成是CPU的协处理器,因此当我们在说GPU并行计算时,其实是指的基于CPU+GPU的异构计算架构。在异构计算架构中,GPU与CPU通过PCIe总线连接在一起来协同工作,CPU所在位置称为为主机端(host),而GPU所在位置称为设备端(device)。
第一章 基于CUDA的异构并行计算
并行计算
- 一个大的问题可以被分解成多个小问题,然后在不同的计算资源上并行处 理这些小问题。
- 并行计算的软件和硬件层面是紧密联系的。
- 事实上,并行计算通常涉及两个不同的计算技术领域。
- 串行编程和并行编程
- 大多数现代处理器的哈佛体系结构(Harvard architecture)
- 计算机架构(硬件方面)
- 并行程序设计(软件方面)
并行性
多层次的并行性设计是架构设计的驱动力。在应用程序中有两种基本的并行类型。
CUDA编程非常适合解决数据并行计算的问题。本书的重点便是如何使用CUDA编程 解决数据并行问题。
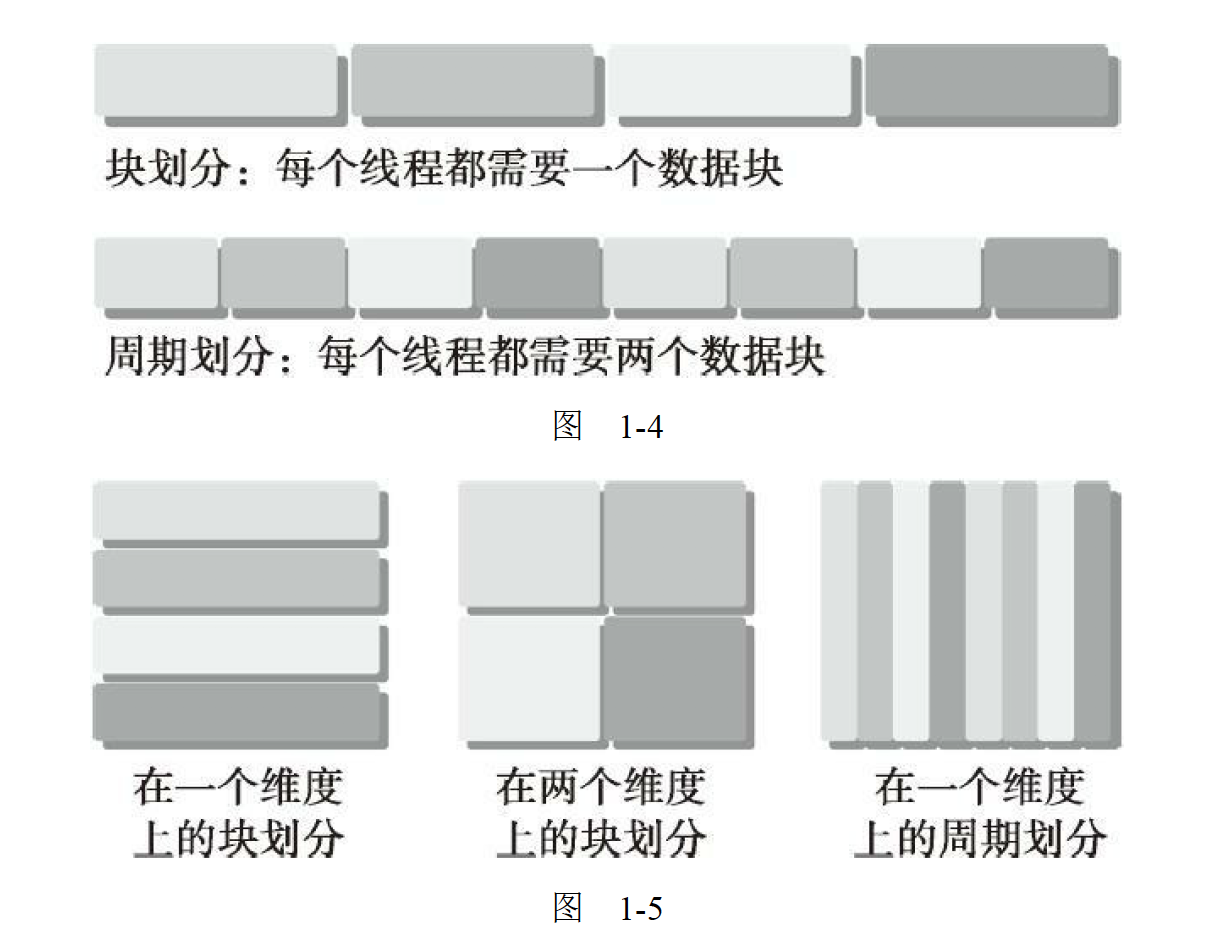
数据并行程序设计
- 块划分(block partitioning)
- 周期划分(cyclic partitioning)
- 一组连续的数据被分到一个块内
- 每个数据块以任 意次序被安排给一个线程
- 线程通常在同一时间只处理一个数据块
- 更少的数据被分到一个块内
- 相邻的线程处理相邻的数据块
- 每个线程可以处理多个数据块
- 为一个待处理的线程选择一个新的块,就意味着要跳过和现有线程一样多的数据块
- 第一步是把数据依据线程进行划分,使每个线程处理一部分数据
- 利用多核系统对数据进行分配
- 利用多核系统对任务进行分配
- 任务并行
- 数据并行
计算机架构
弗林分类法(Flynn’s Taxonomy)
- 降低延迟
- 提高带宽
- 提高吞吐量
- 延迟是一个操作从开始到完成所需要的时间,常用微秒来表示
- 延迟用来衡量完成一次操作的时间
- 带宽是单位时间内可 处理的数据量,通常表示为MB/s或GB/s。
- 吞吐量是单位时间内成功处理的运算数量,通常表示为gflops(即每秒十亿次的浮点运算数量),特别是在重点使用浮点计算的科学计算领域经常用到
- 而吞吐量用来衡量在给定的单位时 间内处理的操作量
- 单指令单数据(SISD)(传统计算机,一种串行架构)
- 单指令多数据(SIMD) (按串行逻辑思考但对并行数据操作实现并行加速,而其他细节则由编译器来负责)
- 多指令单数据(MISD) (每个核心通过使用多个指令流处理同一个数据流)
- 多指令多数据(MIMD)(多个核心使用多个指令流来异步处理多个数据流,从而实现空间上的并行性)
- 根据指令和数据进入CPU的方式
- 实现以下目的,架构取得了许多进展
计算机架构也能根据内存组织方式进行进一步划分
要么是与同一个物理内存相关联
要么共用一个低延迟的链路(如PCIExpress或PCIe)
多核架构已经永久地取代了单核架构
多线程、 MIMD(多指令多数据)、SIMD(单指令多数据),以及指令级并行。
NVIDIA公司称这 种架构为SIMT(单指令多线程)
“众核”(many-core)通常是指有很多核心(几十或几百个)的多核架构
GPU代表了一种众核架构,几乎包括了前文描述的所有并行结构:
这种系统常被称作集群
分布式内存的多节点系统
共享内存的多处理器系统
GPU核心和CPU核心
- 较轻,用于优化具有简单控制逻辑的数据并行任务,注重并行程序的吞吐量
- 较重,用来处理非常复杂的控制逻辑,以优化串行程序执行
- 两种核心是完全不同的
- CPU核心
- GPU核心
异构计算
GPU指的是离散的设备从同构系统到异构系统的转变是高性能计算 史上的一个里程碑。
同构计算使用的是同一架构下的一个或多个处理器来执行一个应用。
而异构计算则使用一个处理器架构来执行一个应用,为任务选择适合它的架构,使其最终对性能有所改进。
- 系统的有效利用 受限于增加应用程序设计的复杂性
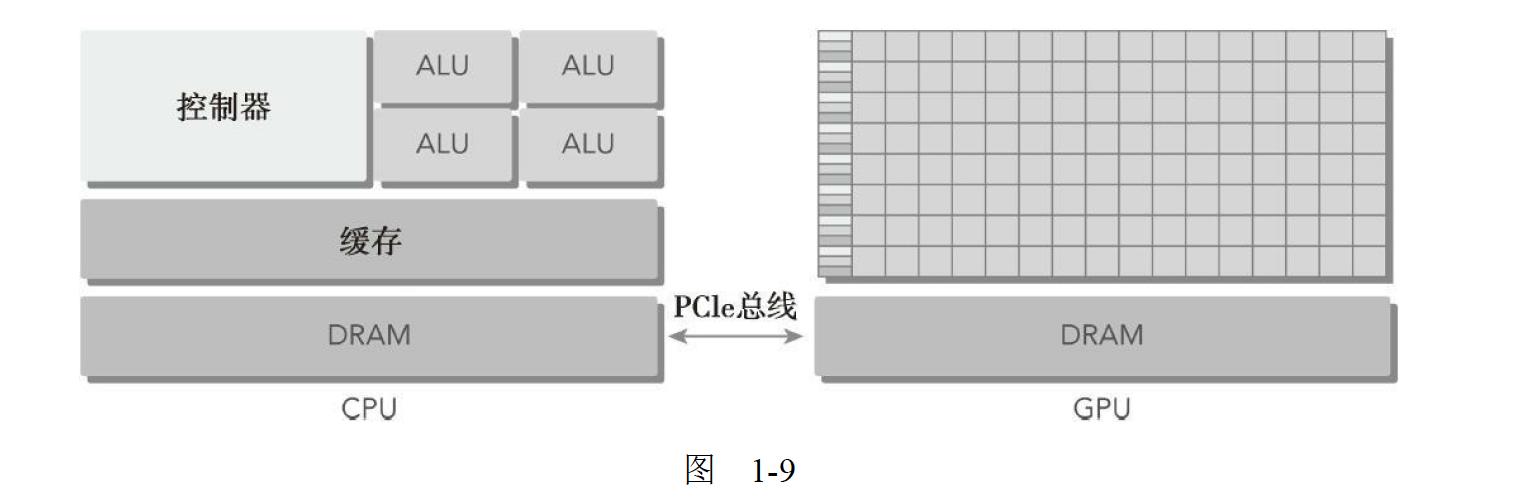
异构架构
一个典型的异构计算节点
- GPU不 是一个独立运行的平台而是CPU的协处理器
- 通过PCIe总线与基于CPU的 主机相连来进行操作
- 两个多核CPU插槽(主机端)
- 两个或更多个的众核GPU (设备端)
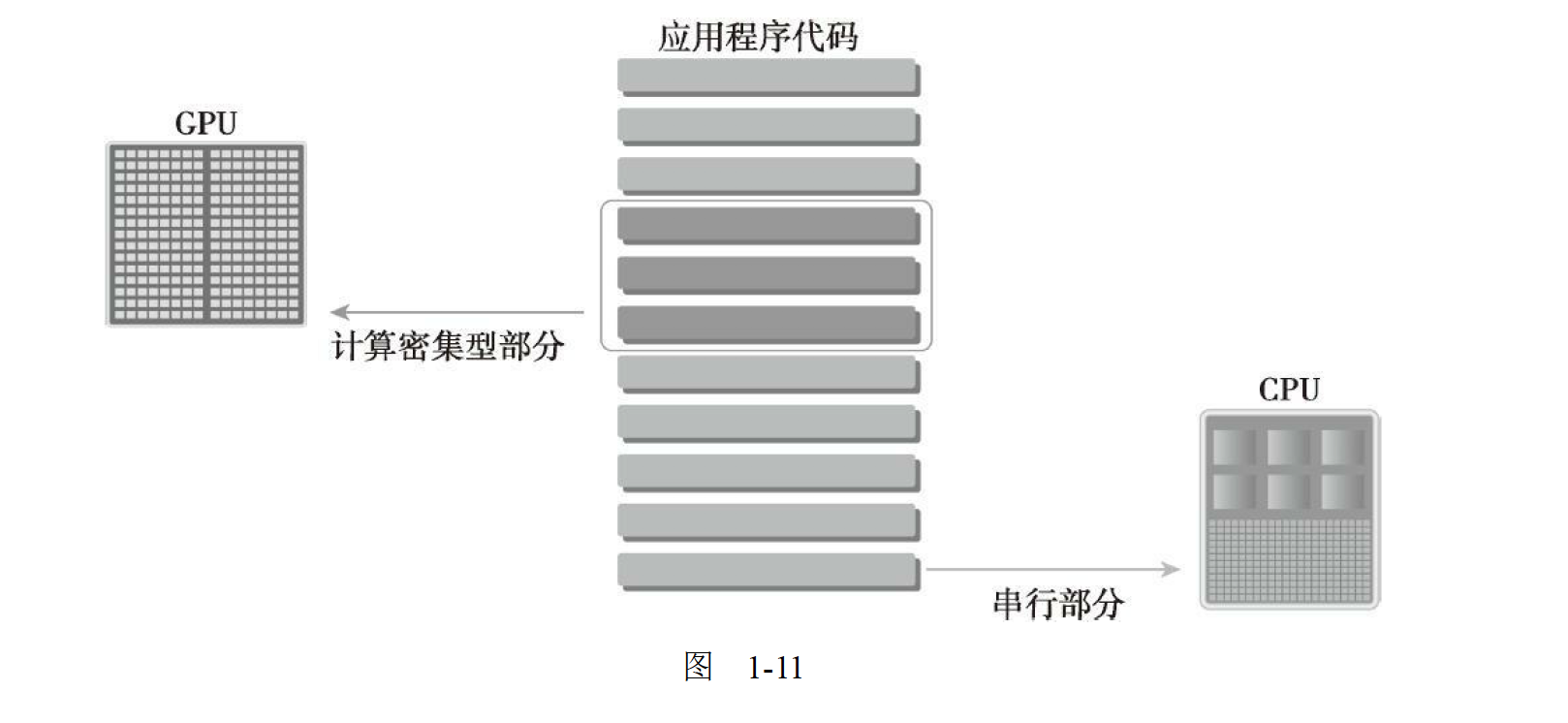
一个异构应用包括两个部分
在计算密集型应用中,往往有很多并行数据的程序段。
GPU就是用来提高这些并行数据的执行速度的。
在设备端加载计算密集型任务之前,CPU代码负责管理设备端的环境、代码和数据。
主机代码(CPU上运行)
设备代码(GPU上运行)
NVIDIA公司的GPU计算平台
- Fermi是Tesla系列产品中的一种,用作GPU加速器,近来在高性能计算中获得了广泛应用
- Fermi之后的新一代GPU 计算架构Kepler,于2012年秋季发布,其处理能力相比以往的GPU有很大提升,并且提供 了新的方法来优化和提高GPU并行工作的执行,有望将高性能计算提升到新的高度
- Tegra系列产品是专为移动和嵌入式设备而设计的,如平板电脑和手机
- GeForce面向图形用户
- Quadro用于专业绘图设计
- Tesla用于大规模的并行计算
描述GPU容量的两个重要特征
- CUDA核心数量
- 内存大小
两种不同的指标来评估GPU的性能
- 内存带宽是从内存中读取或写入数据的比率。
- 内存带宽通常用 GB/s表示。
- 峰值计算性能是用来评估计算容量的一个指标,通常定义为每秒能处理的单精度或双 精度浮点运算的数量.
- 峰值性能通常用GFlops(每秒十亿次浮点运算)或TFlops(每秒万 亿次浮点运算)来表示。
- 峰值计算性能
- 内存带宽
计算能力
- NVIDIA使用一个术语“计算能力”(compute capability)来描述整个Tesla系列的GPU加 速器的硬件版本。
异构计算范例
GPU计算并不是要取代CPU计算
Tip:这一段我就不写了,本章节的主要内容用一张图即可概括
CUDA:一种异构计算平台
API
CUDA提供了两层API来管理GPU设备和组织线程。
这两种API是相互排斥的,你必须使用两者之一,从两者中混合函数调用是不可能的。
CUDA驱动API
- 驱动API是一种低级API,它相对来说较难编程
- 对于在GPU设备使用上提供了更多的控制
CUDA运行时API
- 运行时API是一个高级API
- 它在驱动API的上层实现
- 每个运行时API函数都被分解为更多传给驱动API的基本运算
也就是说Runtime api 可以看作是由Driver api 封装而成的
CUDA程序
一个CUDA程序包含了以下两个部分的混合。
- 在CPU上运行的主机代码
- 在GPU上运行的设备代码
一个典型的CUDA编程结构包括5个主要步骤
- 分配GPU内存
- 从CPU内存中拷贝数据到GPU内存
- 调用CUDA内核函数来完成程序指定的运算
- 将数据从GPU拷回CPU内存
- 释放GPU内存空间
进阶
数据局部性在并行编程中是一个非常重要的概念。
- 时间局部性是指在相对较短的时间段内数据和/或资源的重用。
- 空间局部性是指在相对较接近的存储空间内数据元素的重用。
- 数据局部性指的是数据重用,以降低内存访问的延迟。
- 数据局部性有两种基本类型
CUDA中有内存层次和线程层次的概念
内存层次结构
线程层次结构
例如:
在CUDA编程模型中使用的共享内存(一个特殊的内存)。
共享内存可以视为 一个被软件管理的高速缓存,通过为主内存节省带宽来大幅度提高运行速度。
有了共享内存,你可以直接控制代码的数据局部性。
编译环境:本代码将使用nvcc编译器来编译,你可以使用以下命令来检查CUDA是否正确安装:
1 | $ which nvcc |
用GPU输出 Hello World
不妨先写一个cuda C程序,命名为helloFromGPU,用它来输出字符串 “Hello World from GPU!”
1 | ========================== 代码清单 1-1 Hello World from GPU (hello.cu) ========================== |
在linux终端下使用以下命令进行编译hello.cu,然后执行程序得到
1 | $ nvcc -arch sm_20 hello.cu -o hello |
在上面的代码中,cudaDeviceReset表示重置当前线程所关联过的当前设备的所有资源;修饰符__global__告诉编译器这是一个内核函数,它将从CPU中调用,然后在GPU上执行,在CPU上通过下面的代码启动内核函数
1 | helloFromGPU <<<1, 10>>>(); |
三重尖号意味着从主线程到端代码的调用。1和10分别表示有1个块区域和10个线程,后续会作相关介绍。