Yann
人工智能、计算机、机器学习、linux、程序员
红外循迹传感器
这次尝试制作了一个简单的红外循迹传感器,红外循迹传感器是专为轮式机器人设计的一款距离可调式避障传感器。其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,开关指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V,由于工作电压范围宽泛,在电源电压波动比较大的情况下仍能稳定工作,该传感器的探测距离可以通过电位器调节、具有干扰小、使用方便等特点,可以广泛应用于机器人避障、避障小车和黑白线循迹等众多场合。适合多种单片机、Arduino控制器、树莓派使用,安装到机器人上即可感测周围环境的变化。
电路工作说明
1、 当模块检测到前方障碍物信号时,开关指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测距离可以通过电位器进行调节。
2、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器。
3、比较器采用LM393。
4、可采用3-5V直流电源对模块进行供电。当电源接通时,电源指示灯点亮。
接口说明
1 、VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连);
2 、GND 外接电源负极;
3 、OUT 为数字量输出接口(输出0或1高低电平)
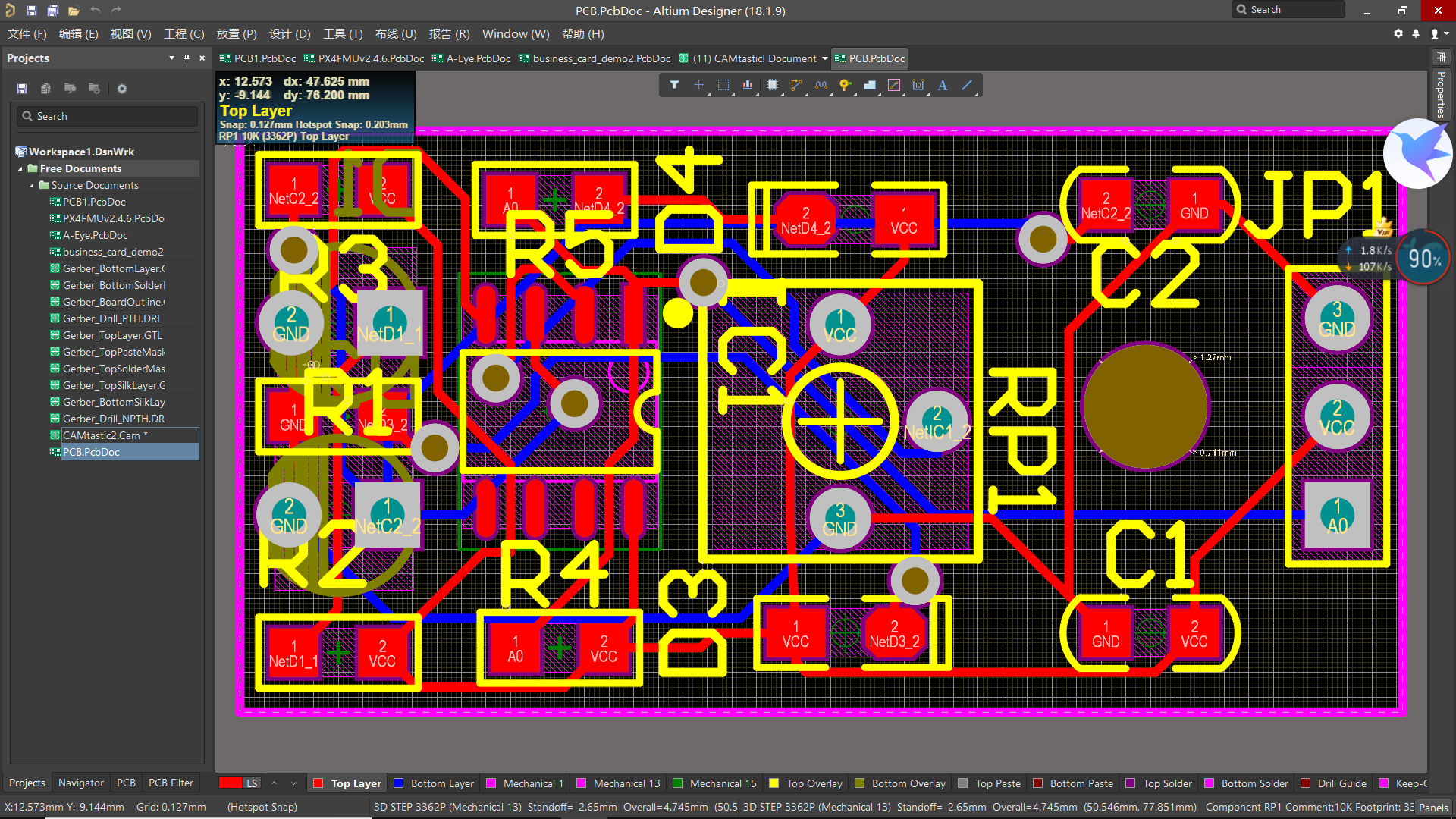
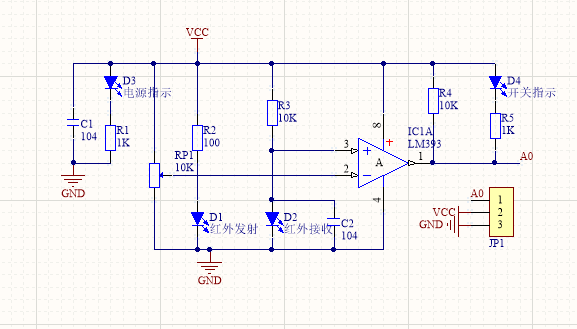
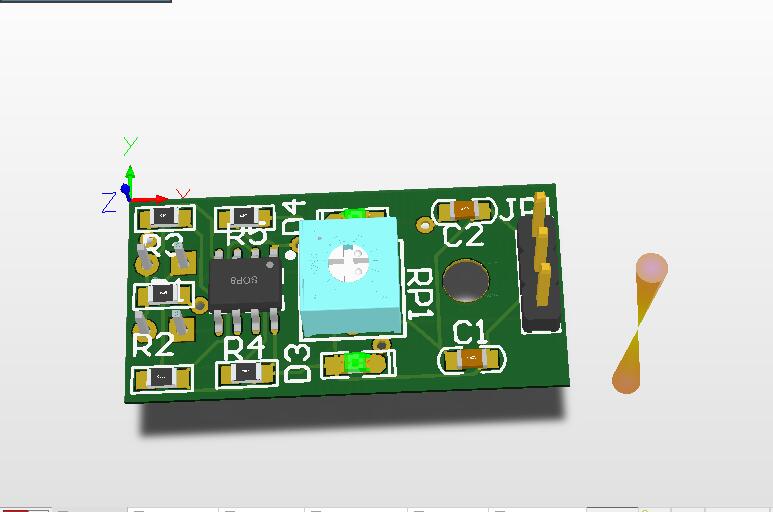
Altium Designer画的原理图和PCB图如下: