
- ABSTRACT
- 1. Introduction and Motivation
- 2. Related work
- 3. Architecture Search Space
- 4. Neural Architecture Search Algorithm
- 4.2. Early Stopping
- 4.3. Resource-Aware Architecture Search
- 5. Experiments and Results
- 6. Network Analysis
- 7. Conclusion
用NAS做语义分割,1.不使用代理,MobileNetV3先搜索分类任务作为代理,SqueezeNAS直接搜索语义分割。 2.使用资源感知损失,直接优化目标平台上的延迟,而不是优化MAC指标,它对于运行速度没有必然关系
ABSTRACT
真实场景下,需要DNN在目标任务上准确率高,在目标计算平台上推断延迟低。NAS已经被用于低延迟的图像分类,但是其他任务还很少。这是第一篇用于密集语义分割的无代理硬件感知的搜索。在Cityscapes数据集上达到最好的性能。我们证明了利用NAS对任务和推断同时优化可以获得极大地性能提升。
1. Introduction and Motivation
在做非图像分类任务(如语义分割或目标检测)时,流行的方法是结构迁移:从一个图像分类网络开始,在网络末尾添加一些针对特定任务的层。
这种结构迁移的主流主要是一些传统假设,我们罗列一些并证明为什么他们已经过时了。
- 假设1: 在ImageNet上准确率最高的网络也应该是目标任务上准确率最好的骨干网络
实际上,ImageNet的准确率与目标任务准确率关系不太大。SqueezeNet在ImageNet上准确率低于VGG,但是对上定位图像相似部分的任务上更好。正确的网络设计取决于目标任务。
- 假设2: NAS成本过高
实际上,有些方法的确需要数千个GPU天,但是最近的“supernetwork”方法例如DARTS和FBNet可以在10个GPU天上取得最优结果。
- 假设3: 低MAC(Fewer multiply-accumulate)运算在目标平台上有较低的延迟
实际上,有工作证明了相同的平台上,同样的MAC可以有10x的延迟差异。取决于处理器和内核实现,即使是相同的MAC也有不同的速度。
为了在目标计算平台和任务上获得更低的延迟,更高的准确率:
- 直接对目标任务运行NAS,例如目标检测、语义分割,不要去优化代理任务,如图像分类。
- 使用现代的基于supernetwork的NAS,相信搜索可以快速收敛。
- 让NAS同时优化准确率和延迟。
2. Related work
【略】
3. Architecture Search Space
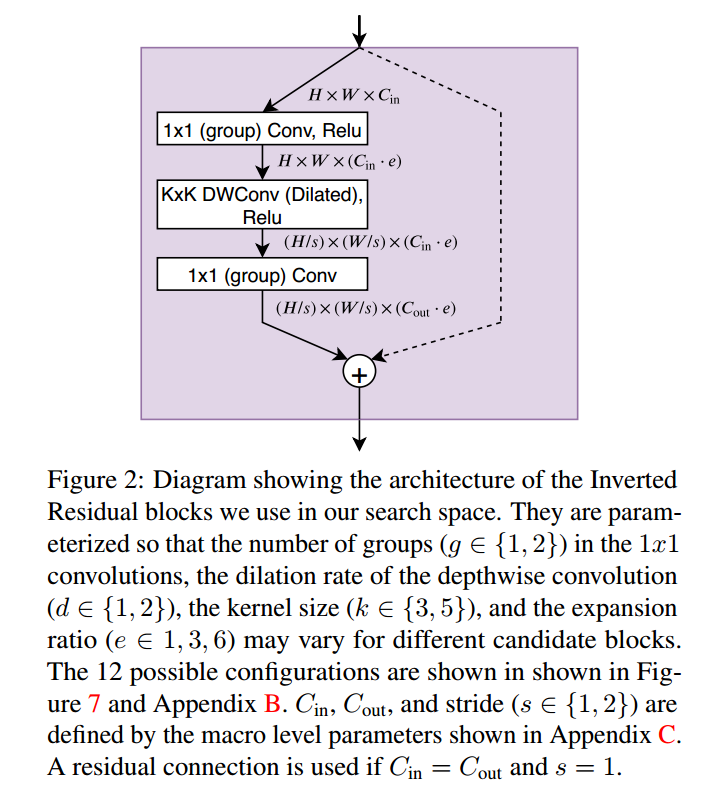
我们探索了顺序反向残差模块的语义分割网络编码器的空间。这些块参数化如图2。每次结构搜索,我们约束宏观结构,对每个块寻找最优参数。搜索空间和FBNet,MobileNetV2,MobileNetV3相似,这样可以直接比较对分割优化的网络和他们对分类优化的网络。
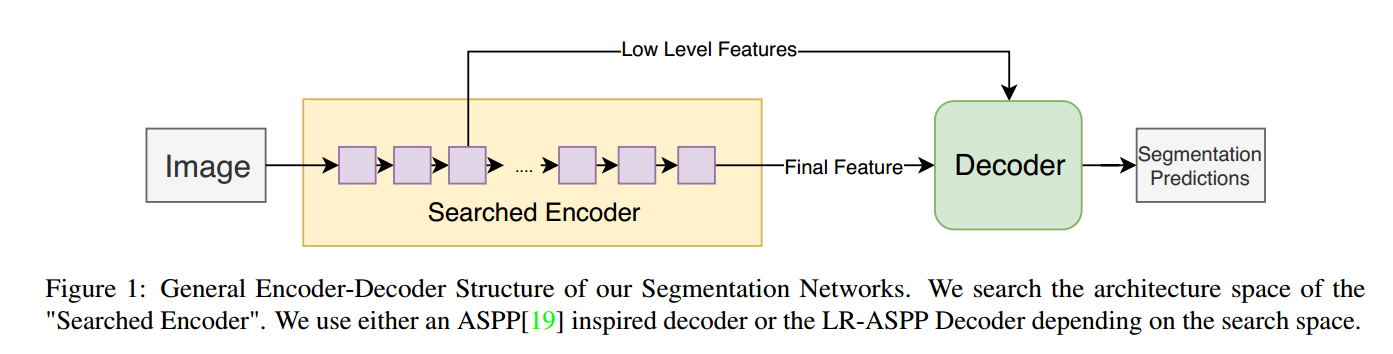
我们网络的基本结构如图1,解码器使用编码器的输出和低层特征。
3.1. Constrained Macro-Architecture
搜索三个空间,Small, Large, XLarge。为了定义结构空间,先约束编码网络的宏观结构。宏观结构描述了编码器的模块数量N,解码器也是这么多。对于每个模块,固定输入和输出通道,$c_{in} $和$c_{out}$每个块的深度卷积层步长使用1或2。由于运行跳跃连接,所以最终的层数可能小于N。
在Small和Large的搜索空间,使用LR-ASPP解码器。在XLarge搜索空间,我们使用完全深度卷积的ASPP变种。
3.2. Block Search Space
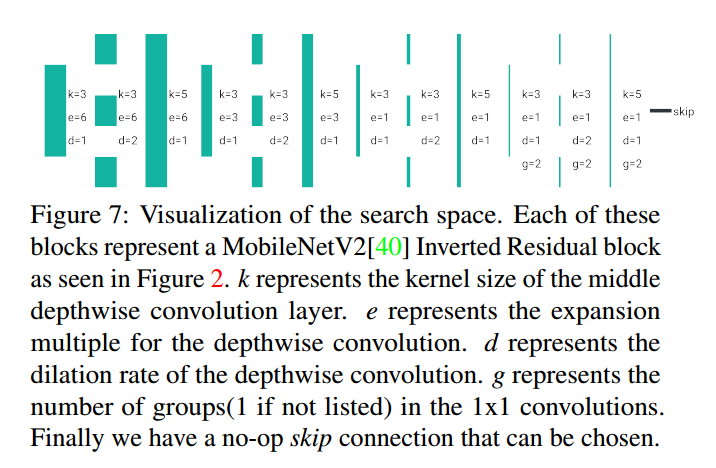
在每个宏观搜索空间,NAS挑选每个块最优的超参数,或者替换为无运算的跳跃连接。如图2,超参数定义了 1*1 卷积是否分组,深度绝技是否膨胀2倍,深度卷积的核大小k,膨胀率e。如图7,我们挑选12个可能的配置。
4. Neural Architecture Search Algorithm
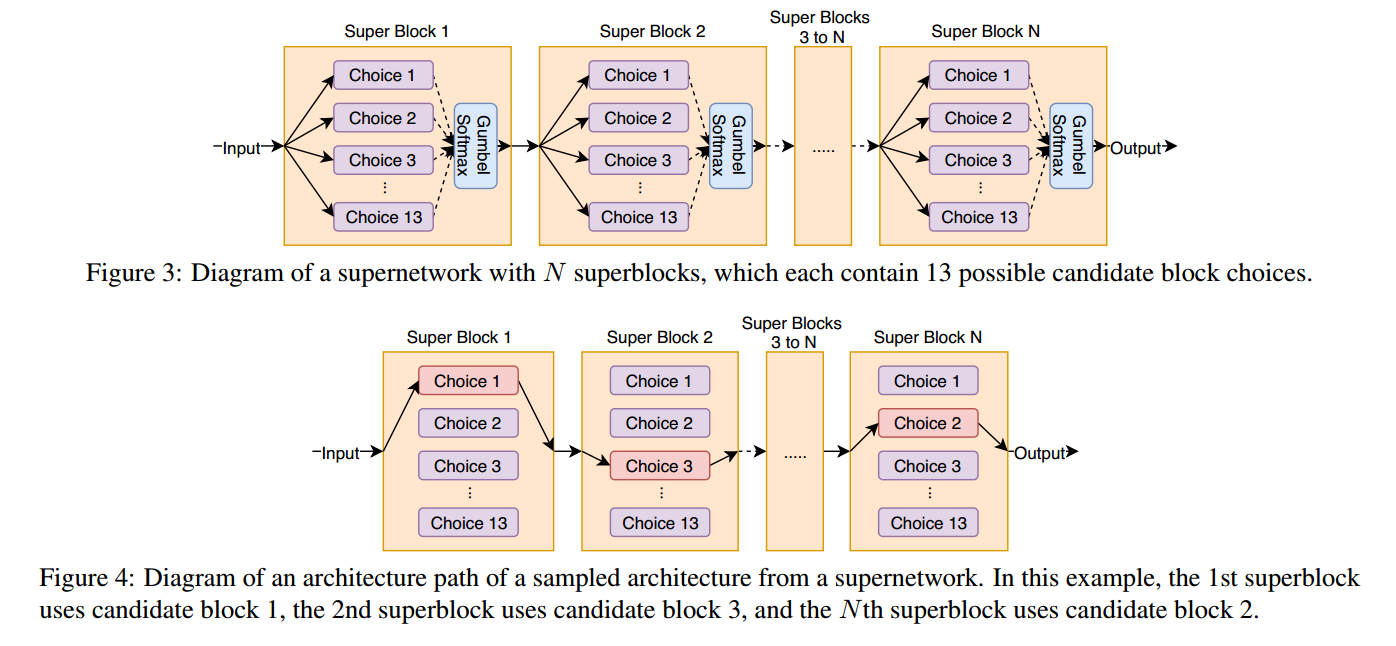
把结构搜索看做是复杂supernetwork的路径选择问题,这样确定的结构可以看做是supernetwork的某些路径。如图3,我们定义supernetwork为superblocks的序列,图4是一个例子。
同时优化卷积权重w和结构参数θ, 优化损失函数为L(θ,w)=LP(θ,w)+α∗LE(θ*)
$L_p$表示特定问题的损失,$L_E$是资源感知损失项,超参数α控制两个平衡。由于本工作关注与语义分割,是$L_p$像素级别的交叉熵。对于,$L_E$我们同时实验了目标平台的推断延迟和Multiply-Accumulates的估计值。
表示特定问题的损失,αLP是像素级别的交叉熵。对于
我们同时实验了目标平台的推断延迟和Multiply-Accumulates的估计值。
4.1. Gumbel-Softmax
为了让supernetwork的优化和计算可跟踪,每个superblock独立挑选一个候选块。这样,可以把这个选择看成是对独立类别分布的采样,把superblock i的候选块j概率记作p(i,j) , 用softmax定义:$p ( i , j | \theta ) = \frac { e ^ { \theta _ { i , j } } } { \sum _ { j } ^ { 13 } e ^ { \theta _ { i , j } } }$
类别分布很难高效优化,所以我们使用Gumbel-Softmax松弛。Gumbel-Softmax分布由稳定参数t控制,t趋近于0,Gumbel-Softmax分布等价于类别分布,稳定参数从5.0到1.0退火。
4.2. Early Stopping
我们的supernetwork方法中,优化过程需要计算每一个候选的block,无论学到的结构分布是什么。当最优的网络结构收敛的时候,性能差的候选块虽然选择的概率低,但是依然需要继续计算。所以当候选概率小于0.5%的时候,直接移除。虽然有可能低概率的候选块可能后面是最优的,但是实践中没有发现这种情况。该优化可以减少一半的搜索时间。
4.3. Resource-Aware Architecture Search
定义资源感知损失为:
$L _ { E } ( \theta ) = \sum _ { j } ^ { N } \sum _ { i } ^ { 13 } p \left( i , j | \theta _ { i } \right) C ( i , j )$
C(i, j)表示网络块i选择候选j的资源成本。对每个块独立建模资源成本。
5. Experiments and Results
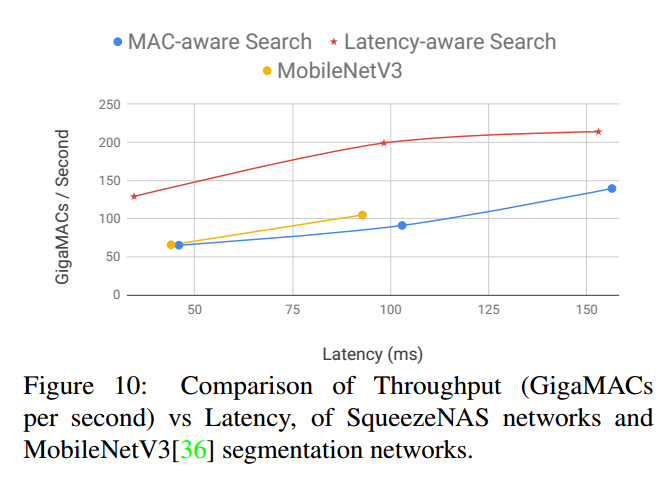
证明两个关键点:第一,NAS是可以产生搞准确率低延迟网络的工具。第二,优化与硬件无直接联系的指标如MAC不是个合适的代理,可能导致局部最优。
沿用Small, Large, XLarge三种搜索空间。先用NAS在每个空间上对MAC进行搜索,然后在嵌入式设备上查看这些低MAC的网络的延迟作为基线。最后再搜索优化硬件感知的延迟找到3个新的网络。
5.1. Hardware-Agnostic Search
对于与硬件无关的结构搜索,使用NAS对MAC进行优化,在MAC和mIOU上找到pareto最优,根据查找表计算每个候选块j的MAC,使得C(i,j)=MACSi,j
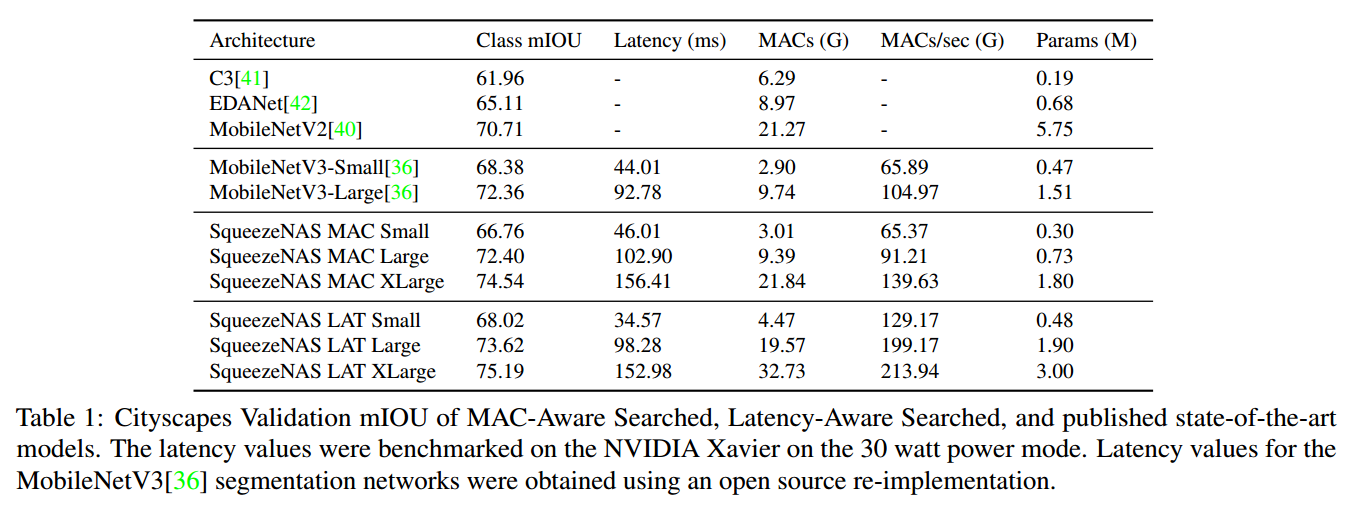
。对每个搜索空间搜索找到最优的SqueezeNAS-MAC网络,结果如下表。
5.2. Hardware-Aware Search
使用相同的NAS算法和搜索空间,但是使用延迟优化目标:C(i,j)=Latency**i,j
。为了计算每个模块j在候选j上的延迟,我们测量了目标平台上所有候选的推断时间,最后得到三个SqueezeNAS-LAT网络。结果见表1。
5.3. Implementation
5.4. Results
6. Network Analysis
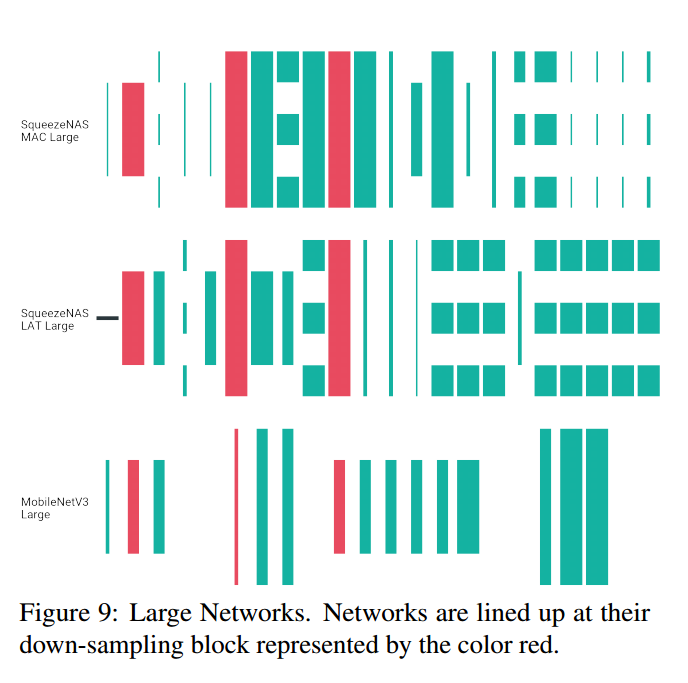
比较三者的模块选择:优化延迟的网络(Latency-aware),优化MAC的网络(MAC-aware),MobileNetV3。由于这三个都使用反向残差块,可以把MobileNetV3的块放入13个候选中,如图7。这里没有考虑SE块。
可视化网络如图8,【略】 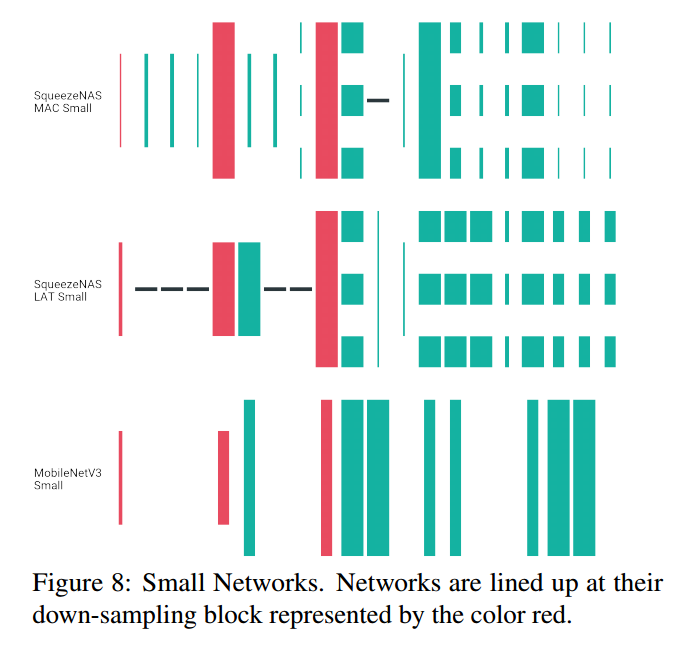
7. Conclusion
第一、做无代理的语义分割搜索,我们的NAS生成的SqueezeNAS系列模型,相比MobileNet V3达到优越的延迟-准确率平衡。这种优越(至少部分)来自于MobileNetV3是用NAS优化图像分类作为代理实现语义分割任务的。
第二、虽然MobileNetV3作者使用了几千个GPU天,但是我们的方法每次搜索只需要7-15个GPU天。也就是说,基于supernetwork的NAS在8个GPU上不需要一个周末就可以跑出来最好的结果。
第三、我们做了两类NAS实验,一个搜索低MAC模型,一个搜索目标平台上低延迟模型。第二个我们获得了非常快同时准确率高的模型。最后,考虑到芯片的速度提升和计算平台的省级,NAS可以继续获得更低的延迟 